Blog
All the latest info and insights from the Akka team
Featured
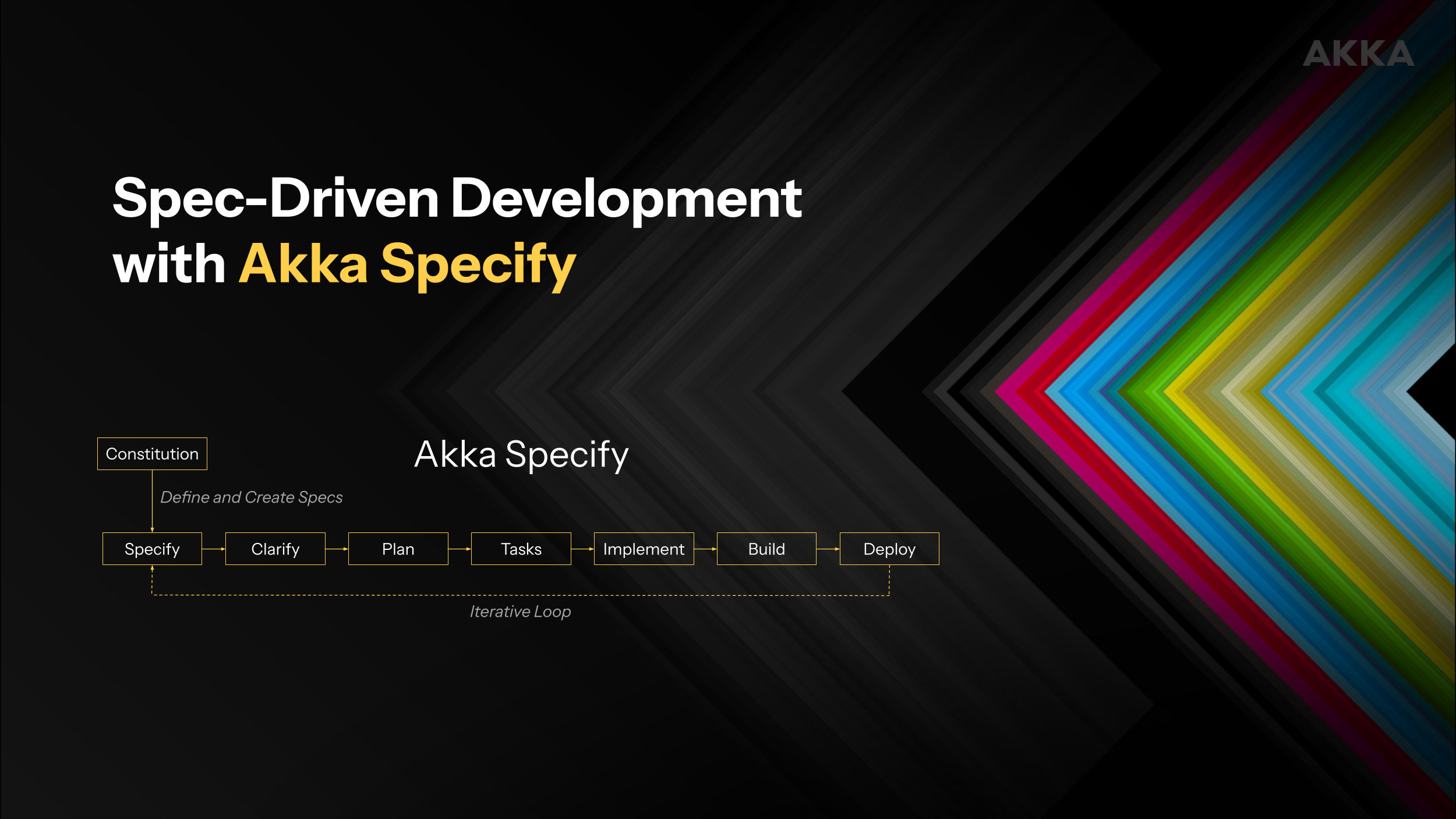
Introducing Akka Specify
Akka Specify provides SDD utilities to design, build, test, deploy and manage agentic AI systems through prompting from within your favorite AI assist tool. No coding, no IDE required.
Manulife Selects Akka to Operationalize Agentic AI within its Enterprise AI Platform
Akka to provide Manulife a secure and scalable software foundation to build hundreds of trusted AI-powered business applications.

Akka and Deloitte Collaborate to Deliver Agentic AI at Scale
Akka and Deloitte join forces to solve critical enterprise agentic AI issues, including cost, performance, and resilience.